
槽型光耦測速sensor
槽型光耦測速sensor
無法載入取貨服務供應情況
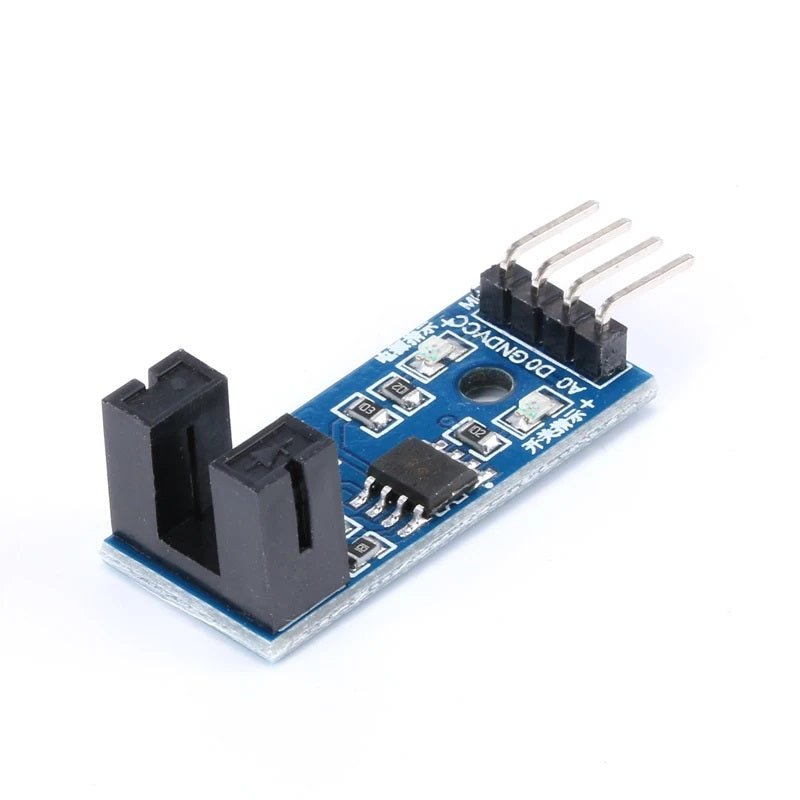
槽式紅外光耦合器速度感測器模組 LM393 適用於 Arduino 凹槽耦合器感測器 3.3V-5V 連接繼電器蜂鳴器模組
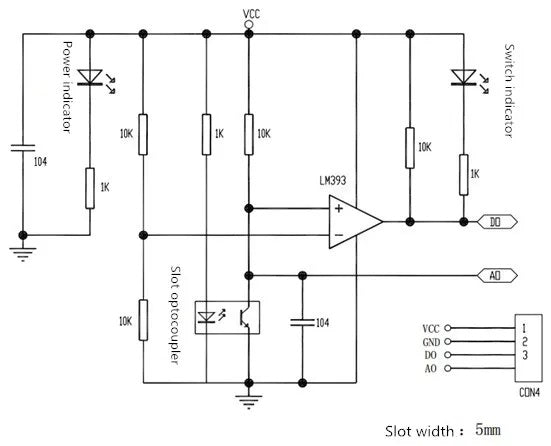
產品特點: ITR9606高靈敏度槽式光耦合器由紅外發光二極體和NPN光電晶體組成,槽寬為5毫米。該感測器專門配備了M3固定安裝孔,調整方向和固定方便易用。它採用寬電壓LM393比較器,信號清晰,波形良好,驅動能力強,超過15mA。廣泛用於電機速度檢測、脈衝計數、位置限制等。
產品參數:
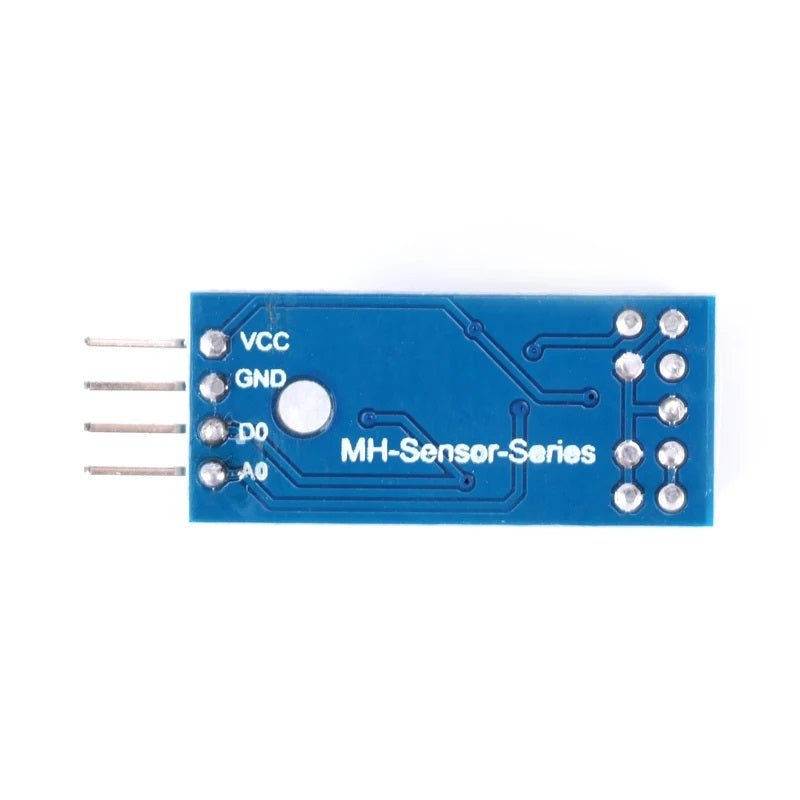
- 工作電壓:3.3V-5V
- 輸出形式:數位開關DO輸出(0和1),類比輸出AO引腳無效
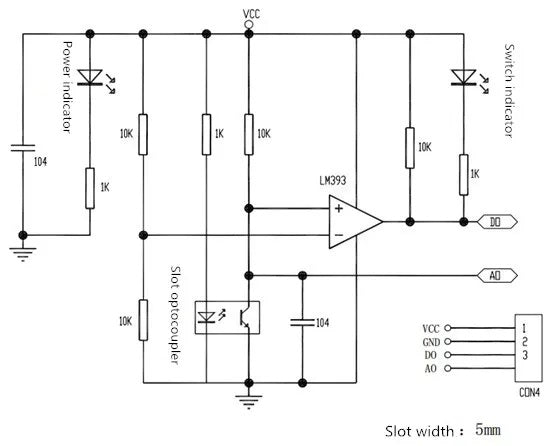
連接VCC和GND,模組電源指示燈將亮起。當模組槽中沒有障礙物時,接收管將打開,模組DO將輸出低電平,開關指示燈將亮起;當有障礙物時,DO輸出將為高電平,開關指示燈將熄滅。模組DO輸出介面可以直接連接到MCU的IO埠。通常,它連接到外部中斷以檢測感測器是否有遮擋。例如,電機編碼輪可以檢測電機速度。
程式設計: 速度測量模組的OUT埠與MCU的外部中斷埠相連。每當有紅外線傳導時,它是一個外部緩衝。
邏輯設計:
測量距離: 速度感測器輸出是脈衝信號,一個脈衝被中斷一次;當紅外線打開時,它是低電平,因此我們將中斷設置為低電平觸摸模式。通常的編碼輪上有整數網格。無論原則上有多少個網格,例如10個網格,即有10個空間。電機旋轉後,光線打開10次,外部低電平被觸摸10次。根據上述思路,我們的速度感測器可以發揮作用,我們知道一個圓中有10個中斷,所以我們計算中斷的次數,得到的總次數除以10就是電機的旋轉次數,然後根據輪子的周長,計算出車子行駛的距離。
測量速度: 根據測量距離的思路,我們使用MCU計時器計算一秒鐘內接收到多少個外部中斷。例如,如果我們在一秒鐘內接收到20個外部中斷,我們可以判斷車速為1秒鐘,小輪轉了兩圈。然後計算小輪的周長,就可以知道車速為1秒鐘。
注意事項: 正確接線!永遠不要反接正負極,以免燒壞電路板。樹莓派 玩家應將MCU的I/O埠設置為輸入模式/接收模式,否則將無法使用。其他MCU,或更先進的控制板,如ARM,如果I/O埠需要設置為輸入/輸出模式,則必須設置為輸入模式/接收模式,否則無法使用。51系列MCU可以直接使用,無需設置輸入/輸出模式。
Share